Welcome to zhangsiyu's blog
这里是我的个人IT学习小天地-
ROS中tf包教程
tf包学习
tf介绍
- tf节点可以使机器人中不同部位的相对坐标系(不同机器人间)以及全局基坐标系之间互相转换.
tf中的工具
tf包中的view_frames节点可以绘制一个坐标链接图(带帧数)rqt_tf_tree包中的rqt_tf_tree节点可以显示由tf广播的不同框架tf包中的tf_echo [reference_frame] [target_frame]可查看target frame目标坐标系在reference frame参考坐标系中的位置`
tf配置
- 在许多与pose姿态有关的消息类型中.hearer.frame_id可填写对应的tf坐标系
- package.xml配置三个tf依赖build_depend,build_export_depend,exec_depend
- CMakeLists.txt中配置 find_package
C++ 用订阅器subscribe创建坐标系广播链接broadcaster
- 在package下src中加入broadcastername.cpp ```cpp #include <ros/ros.h> #include <tf/transform_broadcaster.h> //tf包的TransformBroadcaster帮助简化发布任务 #include <turtlesim/Pose.h>
std::string turtle_name;
- tf节点可以使机器人中不同部位的相对坐标系(不同机器人间)以及全局基坐标系之间互相转换.
-
ros的cpp库使用建立ROS服务与客户端
service服务节点
#include "ros/ros.h" #include "beginner_tutorials/AddTwoInts.h"//自定义的srv生成的头文件 bool add(beginner_tutorials::AddTwoInts::Request &req, //提供ros服务从Request读入,结果装入Response中 beginner_tutorials::AddTwoInts::Response &res) //这些数据结构都在AddTwoInts.h中自动生成 { res.sum = req.a + req.b; ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b); ROS_INFO("sending back response: [%ld]", (long int)res.sum); return true; } int main(int argc, char **argv) { ros::init(argc, argv, "add_two_ints_server"); ros::NodeHandle n; ros::ServiceServer service = n.advertiseService("add_two_ints", add);//服务名为add_two_ints ROS_INFO("Ready to add two ints."); ros::spin(); return 0;Client节点
#include "ros/ros.h" #include "beginner_tutorials/AddTwoInts.h" #include <cstdlib> int main(int argc, char **argv)//argc-1为参数个数 { ros::init(argc, argv, "add_two_ints_client"); if (argc != 3) { ROS_INFO("usage: add_two_ints_client X Y"); return 1; } ros::NodeHandle n; ros::ServiceClient client = n.serviceClient<beginner_tutorials::AddTwoInts>("add_two_ints");//为add_two_ints服务创建client beginner_tutorials::AddTwoInts srv;//创建服务数据类型 srv.request.a = atoll(argv[1]);//写入request信息 srv.request.b = atoll(argv[2]); if (client.call(srv))//调用成功则输出response信息 { ROS_INFO("Sum: %ld", (long int)srv.response.sum); } else { ROS_ERROR("Failed to call service add_two_ints"); return 1; } return 0; }后续步骤
- 在CMakeLists.txt文件中加入 ``` #创建可执行程序 add_executable(add_two_ints_server src/add_two_ints_server.cpp) #链接 target_link_libraries(add_two_ints_server ${catkin_LIBRARIES}) #添加依赖 add_dependencies(add_two_ints_server beginner_tutorials_gencpp)
add_executable(add_two_ints_client src/add_two_ints_client.cpp) target_link_libraries(add_two_ints_client ${catkin_LIBRARIES}) add_dependencies(add_two_ints_client beginner_tutorials_gencpp) ```
-
ros的cpp库使用建立ROS接收器与发布器
ROS/ROS.h的使用,创建接收器与发布器
常用依赖库
发布器
#include "ros/ros.h" #include "std_msgs/String.h" #include <sstream> int main(int argc, char **argv) { ros::NodeHandle n;//节点句柄 ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);//准备发布话题 话题类型模板给出,话题名,话题长度参数给出 ros::Rate loop_rate(10);//ros::Rate对象指定自循环频率 int count = 0; /* 1 SIGINT 被触发 (Ctrl-C) 2 被另一同名节点踢出 ROS 网络 3 ros::shutdown() 被程序的另一部分调用 4 节点中的所有 ros::NodeHandles 都已经被销毁 时ros::ok()为false */ while (ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str());//代替printf/cout chatter_pub.publish(msg);//publish之前需要一段时间来通知关于这个主题的发布器与订阅器 ros::spinOnce(); //执行订阅者的回调函数 loop_rate.sleep(); ++count; } return 0; }接收器
#include "ros/ros.h" #include "std_msgs/String.h" //回调函数,参数为话题中的消息 void chatterCallback(const std_msgs::String::ConstPtr& msg) { ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv) { //任何ROSnode都要先初始化 ros::init(argc, argv, "listener"); //定义Node句柄,会完全初始化此节点 ros::NodeHandle n; //告诉mastet node 想接收消息的方式,如下为接收chatter主题,收到是调用chatterCallback回调函数,缓存队列1000 ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); //进入循环 ctrl-C时退出或被master node关闭 ros::spin();//循环执行回调函数 return 0; }CMakeLists.txt 在包目录下创建包时生成 最底部添加内容
cmake_minimum_required(VERSION 2.8.3) project(beginner_tutorials) ## Find catkin and any catkin packages find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg) ## Declare ROS messages and services add_message_files(FILES Num.msg) add_service_files(FILES AddTwoInts.srv) ## Generate added messages and services generate_messages(DEPENDENCIES std_msgs) ## Declare a catkin package catkin_package() ## Build talker and listener ##包含头文件的目录 ##$ {Boost_INCLUDE_DIRS} $ {catkin_INCLUDE_DIRS}变量中有Boost与catkin的库目录 include_directories(include ${catkin_INCLUDE_DIRS}) ####构建名为talker的可执行文件,它由src/talker.cpp源文件构成 add_executable(talker src/talker.cpp) ##指定链接库位置将talker与变量${catkin_LIBRARIES}的内容链接 target_link_libraries(talker ${catkin_LIBRARIES}) ##为目标可执行文件添加依赖 add_dependencies(talker beginner_tutorials_generate_messages_cpp) add_executable(listener src/listener.cpp) target_link_libraries(listener ${catkin_LIBRARIES}) add_dependencies(listener beginner_tutorials_generate_messages_cpp)后续步骤
- 使用
catkin_make编译 - 使用
roscore运行master node source ./devel/setup.bash加载环境变量rosrun运行节点
- 使用
-
CMake与Make
Cmake与Make简介[转]
转自:CSDN
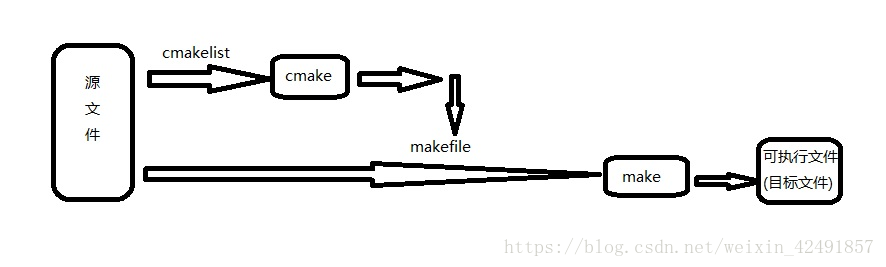
写程序大体步骤为:
1.用编辑器编写源代码,如.c文件。
2.用编译器编译代码生成目标文件,如.o。
3.用链接器连接目标代码生成可执行文件,如.exe。
但如果源文件太多,一个一个编译时就会特别麻烦,于是人们想到,为什么不设计一种类似批处理的程序,来批处理编译源文件呢,于是就有了make工具,它是一个自动化编译工具,你可以使用一条命令实现完全编译。但是你需要编写一个规则文件,make依据它来批处理编译,这个文件就是makefile,所以编写makefile文件也是一个程序员所必备的技能。
对于一个大工程,编写makefile实在是件复杂的事,于是人们又想,为什么不设计一个工具,读入所有源文件之后,自动生成makefile呢,于是就出现了cmake工具,它能够输出各种各样的makefile或者project文件,从而帮助程序员减轻负担。但是随之而来也就是编写cmakelist文件,它是cmake所依据的规则。所以在编程的世界里没有捷径可走,还是要脚踏实地的。
所以流程如下:
-
ROS学习随笔
ROS 学习随笔
ROS框架安装
- ROS有许多不同版本,不同版本支持不同系统
- 我的ROS版本是 ROS Kinetic,它支持unbuntu15.10/16.04
ROS文件系统
- Packages:软件包,ROS应用代码的组织单元
- package.xml 软件包信息描述,定义软件包间的依赖关系
-
rospack获取包相关信息rospack find [包名]获取包名的路径 -
roscd [包名]将工作目录切到包名中os只能切换到包含在
ROS_PACKAGE_PATH环境变量中的包
log包保存了ROS的日志文件 rosls [包名]对这个包名执行ls命令显示其中包含内容roscp [package_name] [file_to_copy_path] [copy_path]复制文件从一个package到另一个错误检查工具
- 在/opt/ros/kinetic目录下用
roswtf工具自检错误建立 catkin workspace工作空间
-
新建 catkin workspace
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/ $ catkin_make 获得文件结构如 -
workspace结构:workspaceFile包含编译空间 开发空间 源空间 1 编译空间是编译用空间,在buid文件夹内
2 源空间在src文件夹内内部包含一个或多个catkin oackage包,用来存储源代码.
src中的CMakeLists.txt3 开发空间,在devel文件夹内
存储可执行文件与库文件
devel中的setup.sh中的一系列指令用来初始设置,可使用$ source devel/setup.bash 进行初始化(如将catkin包加入ROS_PACKAGE_PATH环境变量) ## ROS工作环境脚本 - 全局环境位于
/opt/ros/kinetic/setup.bash - 每个工作空间环境在
空间目录/deve/setup.bash建立ROS package程序包
-
程序包组成结构
my_package/ CMakeLists.txt package.xml 程序包元信息 -
程序包可放在catkin workspace中,结构如
workspace_folder/ -- WORKSPACE src/ -- SOURCE SPACE CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin package_1/ CMakeLists.txt package.xml 包1清单 ... package_n/ CMakeLists.txt package.xml 包n清单 -
catkin_create_pkg [包名] [依赖名1]...[依赖名n]创建程序包,可设置依赖包包应当创建在 workspace/src/目录下
将会自动生成CmakeLists.txt与package.xml
常用的依赖包有roscpp std_msgs rospy - package.xml结构
<description>The beginner_tutorials package</description> **描述标签** <maintainer email="user@todo.todo">user</maintainer> **维护者标签** <license>BSD</license> **许可标签** <buildtool_depend>catkin</buildtool_depend> <build_depend>roscpp</build_depend> **依赖标签**
程序包依赖关系
-
rospack depends1 [包名]查看包名的一级依赖关系依赖关系保存在…/包名/package.xml中
rospack depends [包名]递归检测所有依赖rosdep install --from-paths /path/to/your/catkin_ws/src --ignore-src安装依赖
编译ROS程序包
-
前置条件是,系统安装了所需依赖,source环境配置(setup)
$ source /opt/ros/groovy/setup.bash -
catkin_makecmake+make 生成makefile.txt并编译在工作空间目录下,默认编译…/src中代码.
如该源码不再src中,则应该用
catkin_make --source [my_src]输出编译信息到/build/c_cpp_properties.json
catkin_make -DCMAKE_EXPORT_COMPILE_COMMANDS=Yes -
使用
rosed [package_name] [filename]编辑包下文件设置
$EDITOR可修改rosed的默认编辑器ROS Node节点
- 节点是使用ROS与其他Node通信的可执行文件
- Node节点可以publish or subscribe Topic主题
- Node 可以 provide or use Service服务
- 节点用/划分层次的方式命名,
-
rosnode list列出当前活动节点使用
rosnode cleanup来更新活动列表 rosnode info [节点名]获取具体节点信息rosnode ping [节点名]测试节点运行是否正常-
rosrun [包名] [节点名]运行节点使用
rosrun [包名] [节点名] __name=[自定义名称]自定义节点名,并启动
ROS launch 批量启动节点
roslaunch [package] [filename.launch]filename.launch是一个xml文件结构如下 ```xml
* 设置参数(setting parameters) ```xml <launch> <param name="somestring1" value="bar" /> <!-- force to string instead of integer --> <param name="somestring2" value="10" type="str" /> <param name="someinteger1" value="1" type="int" /> <param name="someinteger2" value="2" /> <param name="somefloat1" value="3.14159" type="double" /> <param name="somefloat2" value="3.0" /> <!-- you can set parameters in child namespaces --> <param name="wg/childparam" value="a child namespace parameter" /> <!-- upload the contents of a file to the server --> <param name="configfile" textfile="$(find roslaunch)/example.xml" /> <!-- upload the contents of a file as base64 binary to the server --> <param name="binaryfile" binfile="$(find roslaunch)/example.xml" /> </launch>ROS master 帮助节点找到互相
*
roscore启动ROS masterROS Topics主题(话题)
- ROS节点通过主题相互通信(主题即是订阅与发布的内容)
-
rostopic显示topic主题的信息rostopic bw [主题名]显示主题使用的带宽rostopic echo [主题名]打印消息到屏幕rostopic hz [主题名]显示主题的发布率
rostopic [主题名]列表打印有关活动主题的信息rostopic pub [主题名]将数据发布到主题rostopic [主题名]类型的打印主题类型 rostopic list列出当前所有主题-
rostopic type [主题名]显示主题类型也是主题发送消息的类型类型名不以/开头 比如geometry_msgs/Twist
rosmsg show[主题类型名]显示该类型的详细信息(数据结构)rostopic pub [主题名] [信息类型] [信息内容1 详细内容2 ....]发布信息到主题
例如: rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -1 -- '{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}' 对应类型结构为 geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z##主题录制与回放
-
rosbag record -a录制当前发布的所有话题rostopic list -v 可查看当前发布的所有话题
rosbag info [bagfile]查看录制文件信息rosbag play [bagfile]公告后开始回放bagfile内容-d设置等待时间-r设置发布速率-O [outfile]设置输出文件rosbagrecord [topicname]设置录制话题消息(msg)
- msg文件是描述ROS中所使用消息类型的文本,会被用来生成不同语言的代码
- 存放在…/package/msg目录下
-
可使用的数据类型如下:
int8, int16, int32, int64 (plus uint*)
float32, float64
string
time, duration
other msg files
variable-length array[] 变长数组
fixed-length array[C] 定长数组
Header 特殊的类型含有时间戳和坐标系信息在std_msgs/msg/Header.msg中定义 - 配置步骤:
- 1.确保package.xml包含,用来转换为语言源码:
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> - 1.5 若有依赖包在package.xml中添加
<build_depend>std_msgs</build_depend> <build_depend>actionlib_msgs</build_depend> -
2.在CMakeLists.txt中添加对message_generation的构建时依赖
利用find_package函数,在COMPONENTS列表里直接添加 message_generation
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation } - 3.运行时依赖 ``` catkin_package{ … CATKIN_DEPENDS message_runtime … }
- 4.添加msg文件表
add_message_files( FILES Message1.msg Message2.msg ) - 5.重新配置
generate_messages() 需要在添加msg\src文件后进行 - 6.配置消息文件依赖的含有.msg的package
generate_messages( DEPENDENCIES std_msgs ) -
重新编译后msg路径下达.msg文件会转会为不同语言的源代码,位置为:
C+++:~/catkin_ws/devel/include/beginner_tutorials/
Python:~/catkin_ws/devel/lib/python2.7/dist-packages/beginner_tutorials/msg
lisp: ~/catkin_ws/devel/share/common-lisp/ros/beginner_tutorials/msg/
服务(srv)
- 在srv文件夹下.srv文件描述一项服务
-
有请求与相应两部分构成以—分隔,如:
int64 A int64 B --- int64 Sum - 配置步骤:
- 1.在CMakeLists.txt中添加对message_generation的构建时依赖
利用find_package函数,在COMPONENTS列表里直接添加 message_generation
find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation }对message_generation对msg和srv都起作用
- 2.添加ser文件表
add_service_files( FILES Service1.srv Service2.srv ) - 3.重新配置并添加依赖
# generate_messages( # DEPENDENCIES # # std_msgs # Or other packages containing msgs # )rqt 可视化查看节点交互情况
- rqt 中有许多ROS package 提供了不同的可视化功能
- 使用
rosrun [包名] [节点名]启动 rqt_graph包的rqt_graph节点可以显示系统中节点通讯的结构rqt_plot包的rqt_plot节点可画出发布数据图rqt_console包的rqt_console节点是ROS日志框架的一部分,用来显示node节点输出信息-
rqt_logger_level包的rqt_logger_level可以修改日志等级说明日志等级由高至低
Fatal 毁灭性的
Error
Warn
Info
Debug rqt_tf_tree包中的rqt_tf_tree节点可以显示由tf广播的不同框架
ROS service服务
- 服务允许节点发送 request 并接收 response
rosservice list显示活动中的服务列表rosservice type [服务名]获得服务类型(输入输出数据结构)rosservice call [服务名] [args]调用服务rossrv show [服务类型名]显示该服务类型详细信息(数据结构)
ROS parameter server(参数服务)
- 使用YAML标记语言的语法:整数1 浮点数1.1 字符串one 布尔值true 列表[1,2,3] 字典{a: b,c: d}
-
rosparam参数相关rosparam set [参数名] [值] 设置参数 rosparam get [参数名] 获取参数 rosparam get / 显示服务器上所有参数 rosparam load [加载文件] [命名空间] 从文件读取参数 rosparam dump [写入文件.yaml] 向文件中写入参数 rosparam delete 删除参数 rosparam list 列出参数名
-
linux-unbuntu学习随笔
linux-unbuntu 学习随笔
搜索指令
-
less文件名用lesss打开文件进行以下操作\内容1 搜索内容1
:q 退出
-
locate [路径/文件名]搜索数据库(/var/lib/locatedb)中的内容updatedb更新文件数据库基本指令
pwd当前路径-
llls -l权限所有者/同一组/其他组
echo[变量/字符串]输出内容cat [文件]输出文件内容cp [复制文件] [目标文件夹]复制文件-
alias 别名="代替名"设置别名alias查看所有别名unalias 别名去除别名 mkdir [目录名]新建目录设备相关指令
-
lsblk查看磁盘信息,可以看到已挂载设备设备都在/dev下
挂载地址为 MOUNTPOINT列内容 umount设备地址取消挂载fdisk设备地址磁盘分区管理dd指定大小拷贝文件脚本相关
-
source fname.bash逐条执行fname.bash中保存的命令一般一批指令写的文件后缀为.bash
-
export设置显示环境变量export PATH=$PATH:<添加的路径>只在当前终端生效 -
~/.bashrc文件中可设置当前用户生效的环境变量export PATH=<你要加入的路径1>:<你要加入的路径2>: ...... :$PATH
/etc/profile中可设置所有用户生效的环境变量-
chmod [权限码] [文件/文件夹路径]权限设置-R递归遍历
进程相关
pgrep进程名查看指定进程的信息网络相关
ifconfig网络接口设置,可显示或配置网卡开发用指令
-
make
用来编译shall脚本程序 ; 在c/c++开发中对makefile进行编译
-
名词缩写
-
PPA personal package archives 个人软件包文档
所有的ppa都在launchpad.net中
- PID Process Identification 进程标识
- 许可协议,常见的开源许可协议有BSD、MIT、Boost Software License、GPLv2、GPLv3、LGPLv2.1和LGPLv3
-